BOSM -6025 විරුද්ධ-හිස විදින ඇඹරුම් යන්තය
1. උපකරණභාවිතා කරන්න:
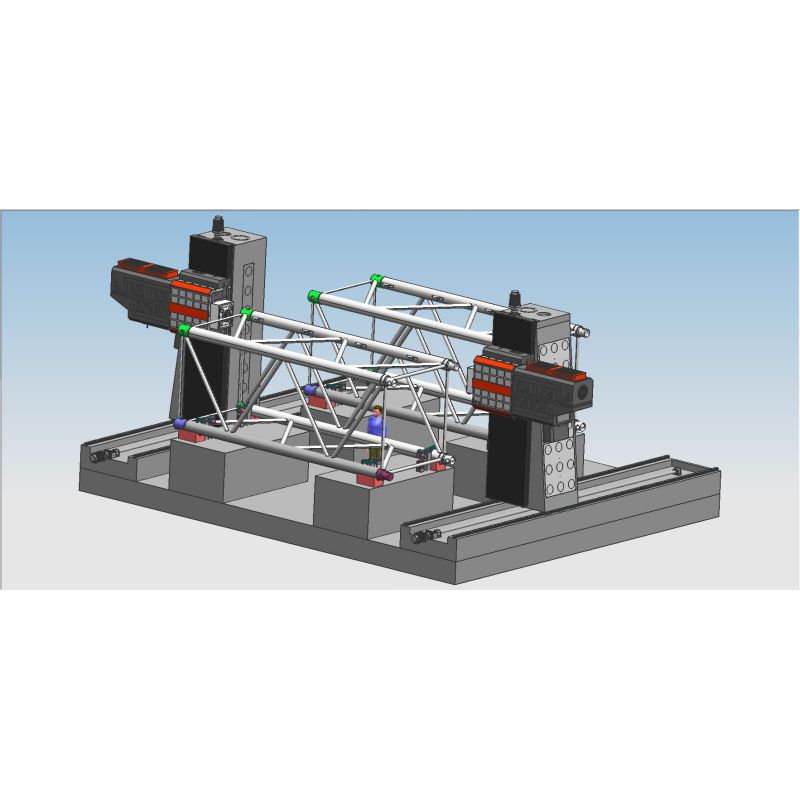
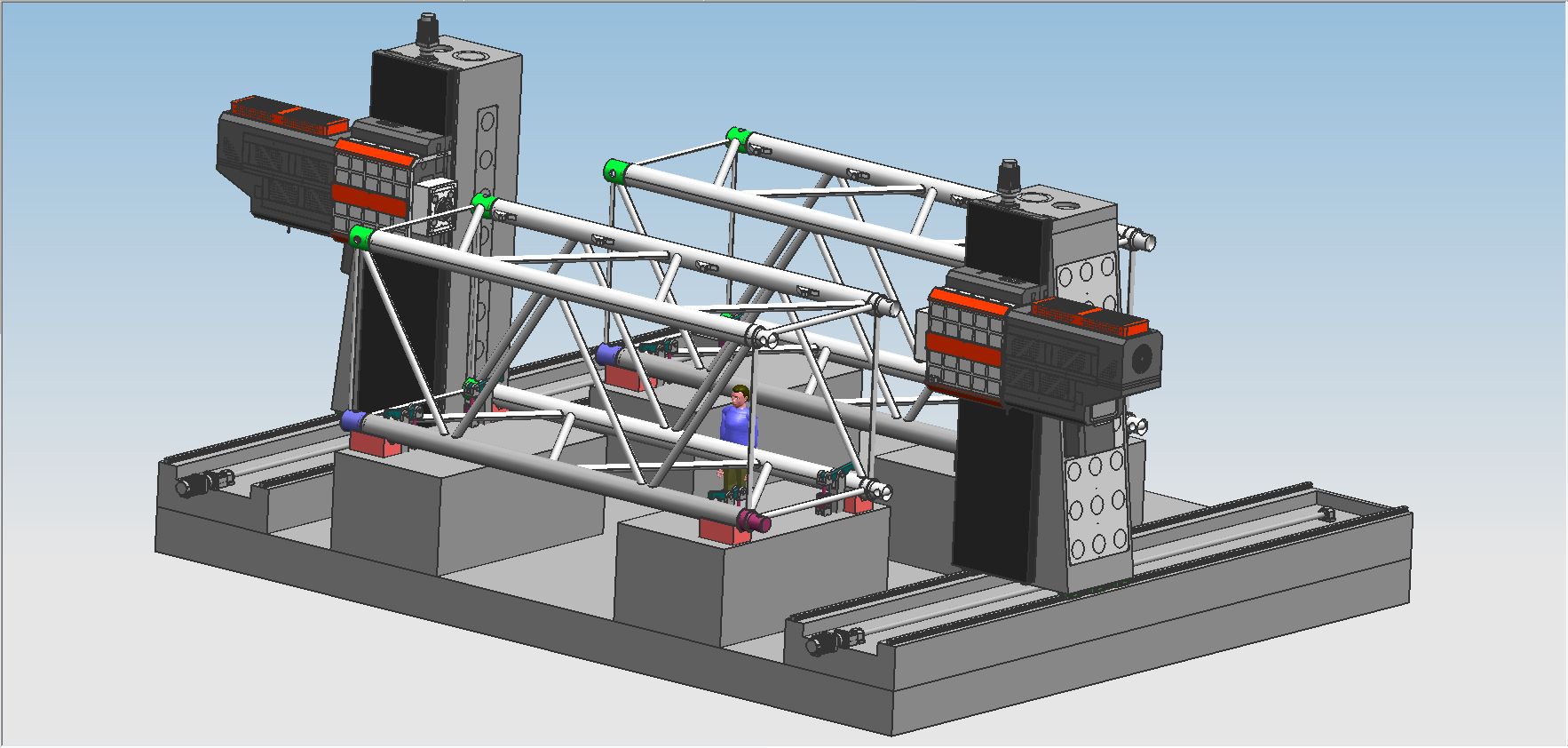
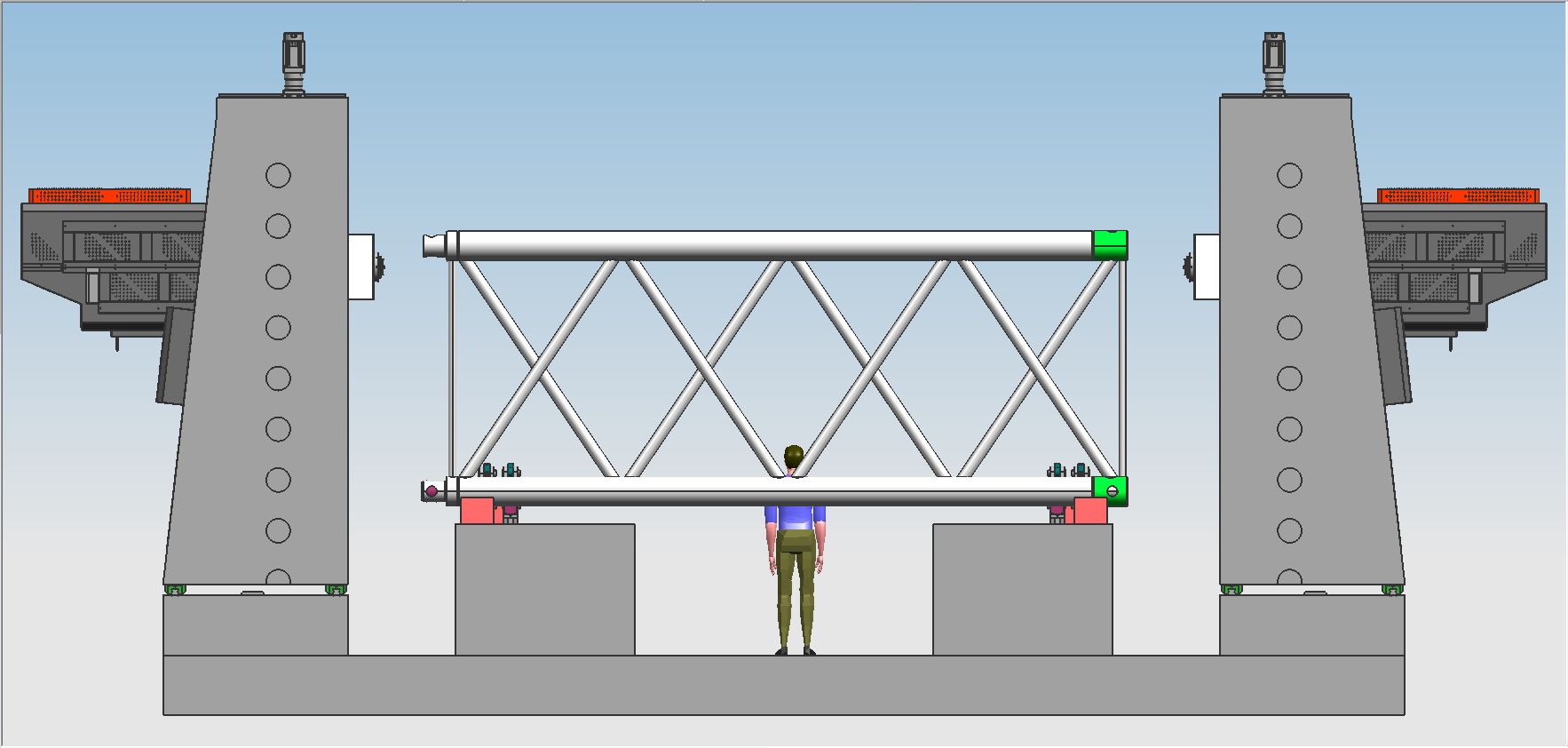
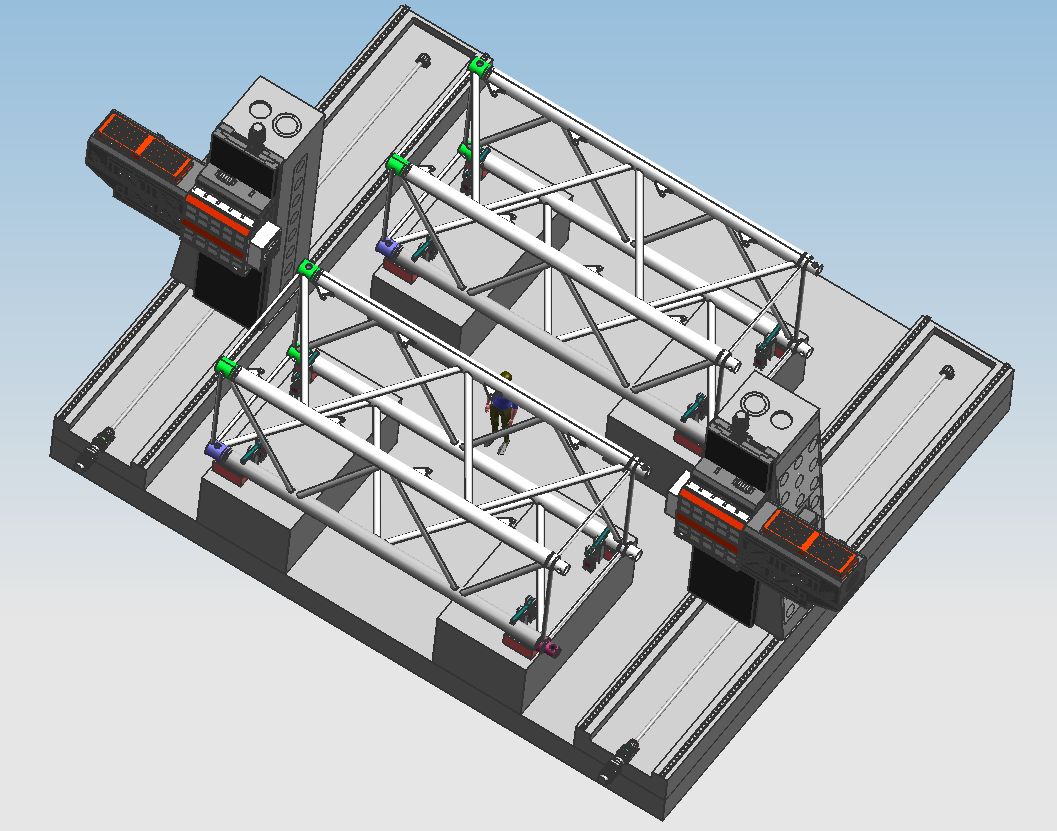
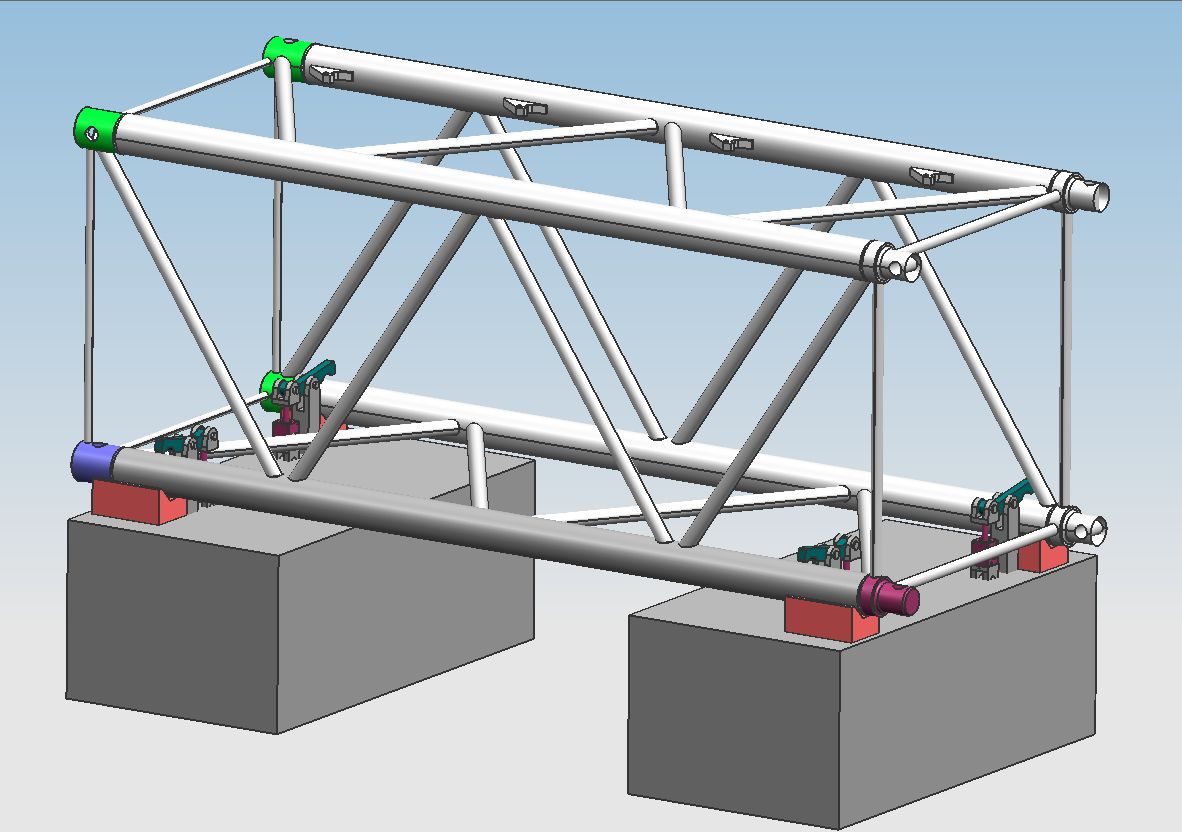
BOSM-6025 ද්විත්ව ස්ථානය, CNC සිරස් තීරු චංචල ද්විත්ව තීරු හිස සිට හිස දක්වා කම්මැලි සහ ඇඹරුම් යන්තය ඉදිකිරීම් යන්ත්රෝපකරණවල සමමිතික වැඩ කොටස් සඳහා විශේෂ යන්ත්ර මෙවලමකි. යන්ත්ර මෙවලම විශේෂ චංචල තීරුවකින් සහ තිරස් බැටළු කට්ටල දෙකකින් සමන්විත වන අතර එමඟින් ඵලදායි ආඝාත පරාසය තුළ වැඩ කොටස විදීම, ඇඹරීම, කම්මැලි කිරීම සහ වෙනත් සැකසුම් ක්රියාවට නැංවිය හැකි අතර, වැඩ කොටස එකවරම සැකසිය හැකිය (අවශ්ය නොවේ. ද්විතියික කලම්ප සඳහා), වේගවත් පැටවීමේ සහ බෑමේ වේගය, වේගවත් ස්ථානගත කිරීමේ වේගය, ඉහළ සැකසුම් නිරවද්යතාවය සහ ඉහළ සැකසුම් කාර්යක්ෂමතාව.
2. උපකරණ ව්යුහය:
2.1. යන්ත්ර මෙවලමෙහි ප්රධාන කොටස්
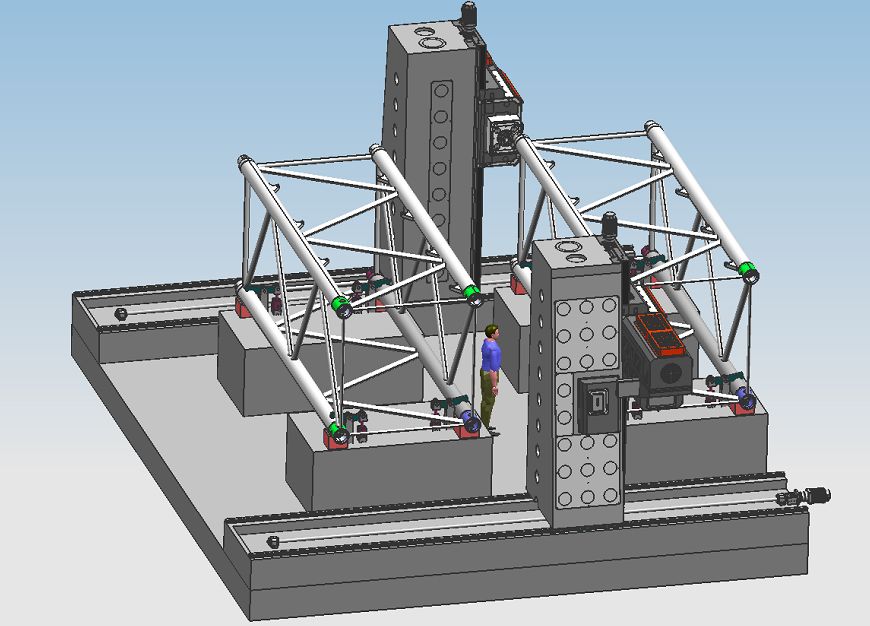
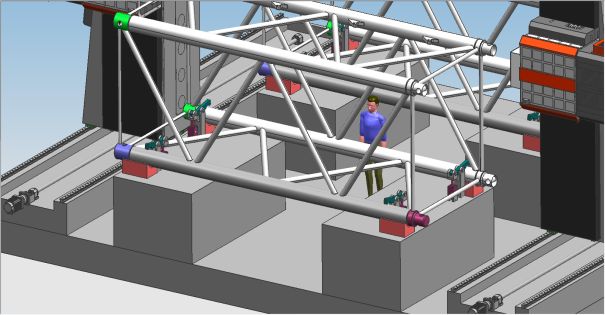
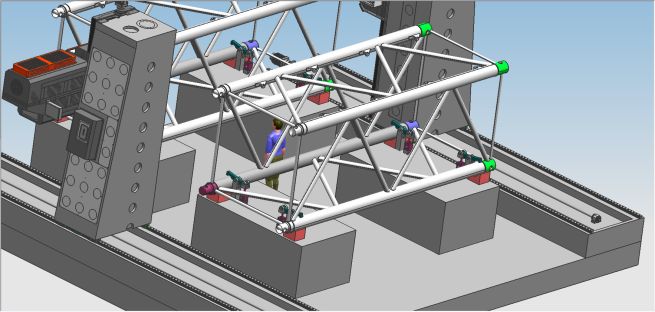
ඇඳ, වැඩ බංකුව, වම් සහ දකුණු තීරු, බාල්ක, සෑදල, බැටළු සහ අනෙකුත් විශාල කොටස් සියල්ලම දුම්මල වැලි අච්චුවකින් සාදා ඇත, උසස් තත්ත්වයේ අළු යකඩ 250 වාත්තු කිරීම, උණුසුම් වැලි වළේ ඇනීල් කර ඇත→කම්පන වියපත් වීම→උණුසුම් උදුන ඇනීම→කම්පන වියපත් වීම→ රළු යන්ත්රකරණය→ කම්පන වයසට යාම→උණුසුම් උදුන නිවාදැමීම→කම්පන වයසට යාම→නිමා කිරීම, කොටස්වල ඍණාත්මක ආතතිය සම්පූර්ණයෙන්ම ඉවත් කර කොටස්වල ක්රියාකාරිත්වය ස්ථාවරව තබා ගන්න. යන්ත්ර මෙවලමට ඇඹරීම, කම්මැලි කිරීම, විදීම, ප්රතිසින්ක් කිරීම, තට්ටු කිරීම යනාදිය වැනි ක්රියාකාරකම් ඇත, සහ මෙවලම් සිසිලන ක්රමය බාහිර සිසිලනය වේ, යන්ත්ර මෙවලමෙහි පෝෂක අක්ෂ 6 ක් අඩංගු වන අතර එමඟින් 4-අක්ෂ සම්බන්ධක සහ 6-අක්ෂ තනි- ක්රියාව. පවර් හෙඩ් 2ක් තියෙනවා. යන්ත්ර මෙවලමෙහි අක්ෂීය දිශාව සහ බල හිස පහත රූපයේ දැක්වේ.
2. 2අක්ෂීය සම්ප්රේෂණ ආහාර කොටසෙහි ප්රධාන ව්යුහය
2.2.1 X 1/X2 අක්ෂය: තීරුව ස්ථාවර ඇඳෙහි මාර්ගෝපදේශක රේල් දිගේ කල්පවත්නා ලෙස ප්රතිවර්තනය වේ.
X-අක්ෂ සම්ප්රේෂණය: X-අක්ෂයේ රේඛීය චලිතය අවබෝධ කර ගැනීම සඳහා බෝල ඉස්කුරුප්පු සම්ප්රේෂණය හරහා තීරු දෙක ධාවනය කිරීමට AC සර්වෝ මෝටරය සහ අධි-නිරවද්ය ග්රහලෝක අඩු කරන්නා භාවිතා කරයි.
මාර්ගෝපදේශ දුම්රිය පෝරමය: ඉහළ ශක්තියකින් යුත් නිරවද්ය රේඛීය මාර්ගෝපදේශක රේල් පීලි දෙකක් තබන්න.
2.2.2 Y1 අක්ෂය: බල ශීර්ෂය සහ බැටළුවක් තීරුවේ ඉදිරිපස පැත්තේ සිරස් අතට සවි කර ඇති අතර, තීරුවේ මාර්ගෝපදේශක රේල් දිගේ වමට සහ දකුණට ප්රතිවර්තනය කරන්න.
Y1-අක්ෂ සම්ප්රේෂණය: සෑදල චලනය කිරීමට සහ Y1-අක්ෂ රේඛීය චලිතය අවබෝධ කර ගැනීමට බෝල ඉස්කුරුප්පු ඇණ ධාවනය කිරීමට AC සර්වෝ මෝටරය භාවිතා කරයි.
මාර්ගෝපදේශ රේල් පෝරමය: රේඛීය මාර්ගෝපදේශ රේල් 4 ක් + දෘඩ රේල් හතරැස් බැම්ම ඒකාබද්ධ.
2.2.3 Y2 අක්ෂය: බල ශීර්ෂයේ දෙවන බැටළුව තීරුවේ ඉදිරිපස පැත්තේ සිරස් අතට සවි කර ඇති අතර තීරුවේ මාර්ගෝපදේශක රේල් දිගේ වම් සහ දකුණට ප්රතිවර්තනය කරයි.
Y2-අක්ෂ සම්ප්රේෂණය: සෑදල චලනය කිරීමට සහ Y2-අක්ෂ රේඛීය චලිතය අවබෝධ කර ගැනීමට බෝල ඉස්කුරුප්පු ඇණ ධාවනය කිරීමට AC සර්වෝ මෝටරය භාවිතා කරයි.
මාර්ගෝපදේශ රේල් පෝරමය: රේඛීය මාර්ගෝපදේශ රේල් 4 ක් + දෘඩ රේල් හතරැස් බැම්ම ඒකාබද්ධ.
2.2.4 Z1 අක්ෂය: පවර් හෙඩ් ස්ලයිඩින් සෑදලය දකුණු තීරුවේ ඉදිරිපස පැත්තේ සිරස් අතට සවි කර ඇති අතර තීරු මාර්ගෝපදේශක දුම්රිය දිගේ ඉහළට සහ පහළට ප්රතිවර්තනය වේ.
Z1-අක්ෂ සම්ප්රේෂණය: AC සර්වෝ මෝටරය සහ අධි-නිරවද්ය ග්රහලෝක අඩු කරන්නා Z1 -අක්ෂ රේඛීය චලිතය සාක්ෂාත් කර ගැනීම සඳහා බෝල ඉස්කුරුප්පු ඇණ හරහා ගමන් කිරීමට බැටළුව පැදවීමට භාවිතා කරයි.
මාර්ගෝපදේශ දුම්රිය පෝරමය: රේඛීය මාර්ගෝපදේශ රේල් 2 ක්.
2.2.5 Z2 අක්ෂය: පවර් හෙඩ් ස්ලයිඩ සෑදලය දකුණු තීරුවේ ඉදිරිපස පැත්තේ සිරස් අතට ස්ථාපනය කර ඇති අතර තීරු මාර්ගෝපදේශක දුම්රිය දිගේ ඉහළට සහ පහළට ප්රතිවර්තනය වේ.
Z1-අක්ෂ සම්ප්රේෂණය: AC සර්වෝ මෝටරය සහ අධි-නිරවද්ය ග්රහලෝක අඩු කරන්නා Z2-අක්ෂ රේඛීය චලිතය අවබෝධ කර ගැනීම සඳහා බෝල ඉස්කුරුප්පු ඇණ හරහා ගමන් කිරීමට බැටළුව ධාවනය කිරීමට භාවිතා කරයි.
මාර්ගෝපදේශ දුම්රිය පෝරමය: රේඛීය මාර්ගෝපදේශ රේල් 2 ක්
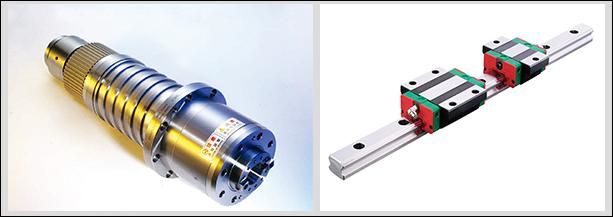
කම්මැලි සහ ඇඹරුම් බල ශීර්ෂය (බල ශීර්ෂය 1 සහ 2 ඇතුළුව) සංයුක්ත හතරැස් බැටළුවක් වන අතර චලනය වන දිශාව රේඛීය රෝලර් මාර්ගෝපදේශ රේල් 4 කින් මෙහෙයවනු ලැබේ. නිරවද්ය බෝල ඉස්කුරුප්පු යුගල ධාවනය කිරීමට ධාවකය AC සර්වෝ මෝටරයක් භාවිතා කරයි. යන්ත්රය නයිට්රජන් සමතුලිත තීරුවකින් සමන්විත වේ. , ඉස්කුරුප්පු ඇණ සහ සර්වෝ මෝටරය මත මැෂින් හිසෙහි දරණ ධාරිතාව අඩු කරන්න. Z-axis මෝටරයට ස්වයංක්රීය තිරිංග ක්රියාකාරිත්වයක් ඇත. විදුලිය බිඳවැටීමකදී, ස්වයංක්රීය තිරිංග මඟින් මෝටර් පතුවළ කරකැවීමට නොහැකි වන පරිදි තදින් අල්ලා ගනු ඇත. වැඩ කරන විට, සරඹය වැඩ කොටස ස්පර්ශ නොකරන විට, එය වේගයෙන් පෝෂණය වේ; සරඹ බිටු වැඩ කොටස ස්පර්ශ කරන විට, එය ස්වයංක්රීයව වැඩ කරන සංග්රහයට මාරු වේ. සරඹ බිට් වැඩ ෙකොටස් විනිවිද යන විට, එය ස්වයංක්රීයව වේගවත් rewind වෙත මාරු වනු ඇත; සරඹයේ අවසානය වැඩ කොටසෙන් ඉවත් වී නියමිත ස්ථානයට ළඟා වූ විට, එය ස්වයංක්රීය සංසරණය සාක්ෂාත් කර ගැනීම සඳහා ඊළඟ සිදුරු ස්ථානයට ගමන් කරයි. ශ්රම ඵලදායිතාව වැඩි දියුණු කරන අන්ධ සිදුරු විදීම, ඇඹරීම, චැම්ෆරින් කිරීම, චිප් කැඩීම, ස්වයංක්රීය චිප් ඉවත් කිරීම යනාදිය ක්රියා කිරීමට එයට හැකිය.


500mm stroke Compound Square ram power head, වර්ග බැටළුවෙහි දෘඪතාව රඳවා ගනිමින් මාර්ගෝපදේශක නිරවද්යතාවය බෙහෙවින් වැඩි දියුණු කිරීම සඳහා සම්ප්රදායික ඇතුළු කිරීම් වෙනුවට රේඛීය මාර්ගෝපදේශ භාවිතා කරයි.
2.3. වැඩ ෙකොටස් හයිඩ්රොලික් තද කිරීෙම් කාර්යය
2.4චිප් ඉවත් කිරීම සහ සිසිලනය
වැඩ බංකුවට පහළින් දෙපස සර්පිලාකාර සහ පැතලි දාම චිප් වාහක ස්ථාපනය කර ඇති අතර, ශිෂ්ටාචාර නිෂ්පාදනය සාක්ෂාත් කර ගැනීම සඳහා චිප්ස් අවසානයේ දී සර්පිලාකාර සහ දාම තහඩු අදියර දෙකක් හරහා චිප් වාහකය වෙත ස්වයංක්රීයව මුදා හැරිය හැක. චිප් වාහකයේ සිසිලන ටැංකියේ සිසිලන පොම්පයක් ඇති අතර, මෙවලමෙහි ක්රියාකාරිත්වය සහ සේවා කාලය සහතික කිරීම සඳහා මෙවලමෙහි බාහිර සිසිලනය සඳහා භාවිතා කළ හැකි අතර, සිසිලනකාරකය ප්රතිචක්රීකරණය කළ හැකිය.
3. සම්පූර්ණ ඩිජිටල් සංඛ්යාත්මක පාලන පද්ධතිය:
3.1 චිප් බිඳීමේ කාර්යය සමඟ, චිප් බිඳීමේ කාලය සහ චිප් බිඳීමේ චක්රය මිනිසා-මැෂින් අතුරුමුහුණත මත සැකසිය හැක.
3.2 මෙවලම් එසවීමේ කාර්යය සමඟ, මෙවලම් එසවීමේ දුර මිනිසා-යන්ත්ර අතුරුමුහුණත මත සැකසිය හැක. පිරිසැකසුම් කිරීම මෙම දුර ප්රමාණයට ළඟා වන විට, මෙවලම ඉක්මනින් ඔසවනු ඇත, පසුව චිප්ස් විසි කරනු ලැබේ, පසුව විදුම් මතුපිටට වේගයෙන් ඉදිරියට ගොස් ස්වයංක්රීයව වැඩ කිරීමට පරිවර්තනය වේ.
3.3 මධ්යගත මෙහෙයුම් පාලන පෙට්ටිය සහ අතින් ගෙන යා හැකි ඒකකය සංඛ්යාත්මක පාලන පද්ධතියක් අනුගමනය කරන අතර USB අතුරුමුහුණත සහ LCD ද්රව ස්ඵටික සංදර්ශකයෙන් සමන්විත වේ. ක්රමලේඛනය, ගබඩා කිරීම, සංදර්ශකය සහ සන්නිවේදනය පහසු කිරීම සඳහා, මෙහෙයුම් අතුරු මුහුණතට මිනිසා-මැෂින් සංවාදය, දෝෂ වන්දි සහ ස්වයංක්රීය අනතුරු ඇඟවීම වැනි කාර්යයන් ඇත.
3.4 සැකසීමට පෙර සිදුරු පිහිටීම පෙරදසුන් කිරීම සහ නැවත පරීක්ෂා කිරීමේ කාර්යය උපකරණ සතුව ඇති අතර මෙහෙයුම ඉතා පහසු වේ.
4. ස්වයංක්රීය ලිහිසි කිරීම
යන්ත්ර මෙවලම් නිරවද්ය රේඛීය මාර්ගෝපදේශ දුම්රිය යුගල, නිරවද්ය බෝල ඉස්කුරුප්පු යුගල සහ අනෙකුත් අධි-නිරවද්ය චලන යුගල ස්වයංක්රීය ලිහිසිකරණ පද්ධති වලින් සමන්විත වේ. ස්වයංක්රීය ලිහිසි පොම්පය පීඩන තෙල් ප්රතිදානය කරන අතර ප්රමාණාත්මක ලිහිසි තෙල් කුටිය තෙල්වලට ඇතුල් වේ. තෙල් කුටිය තෙල්වලින් පුරවා ගැනීමෙන් පසු, පද්ධතියේ පීඩනය 1.4-1.75Mpa දක්වා ඉහළ යන විට, පද්ධතියේ පීඩන ස්විචය වසා ඇත, පොම්පය නතර වන අතර, එම අවස්ථාවේදීම බෑමේ කපාටය බානු ලබයි. මාර්ගයේ තෙල් පීඩනය 0.2Mpa ට වඩා අඩු වූ විට, ප්රමාණාත්මක ලිහිසිකාරකය ලිහිසි ස්ථානය පිරවීමට පටන් ගෙන එක් තෙල් පිරවීමක් සම්පූර්ණ කරයි. ප්රමාණාත්මක තෙල් ඉන්ජෙක්ටරයේ නිවැරදි තෙල් සැපයුම සහ පද්ධතියේ පීඩනය හඳුනා ගැනීම හේතුවෙන්, තෙල් සැපයුම විශ්වාසදායක වන අතර, එක් එක් චාලක යුගලයේ මතුපිට තෙල් පටලයක් ඇති බව සහතික කිරීම, ඝර්ෂණය සහ ඇඳීම අඩු කිරීම සහ හානි වැළැක්වීම යන්ත්ර මෙවලමෙහි නිරවද්යතාවය සහ ආයු කාලය සහතික කිරීම සඳහා අධික උනුසුම් වීම නිසා ඇති වන අභ්යන්තර ව්යුහය. ස්ලයිඩින් මාර්ගෝපදේශ රේල් යුගල සමඟ සසඳන විට, මෙම යන්ත්ර මෙවලමෙහි භාවිතා කරන රෝලිං රේඛීය මාර්ගෝපදේශ රේල් යුගලයට වාසි මාලාවක් ඇත:
① ඉහළ චලන සංවේදීතාව, රෝලිං මාර්ගෝපදේශ රේල් වල ඝර්ෂණ සංගුණකය කුඩා වන අතර, 0.0025-0.01 පමණක් වන අතර, රියදුරු බලය විශාල වශයෙන් අඩු වී ඇති අතර, එය සාමාන්ය යන්ත්රෝපකරණ 1 ට පමණක් සමාන වේ. /10. ② ගතික සහ ස්ථිතික ඝර්ෂණය අතර වෙනස ඉතා කුඩා වන අතර, පසු විපරම් කාර්ය සාධනය විශිෂ්ටයි, එනම්, රියදුරු සංඥාව සහ යාන්ත්රික ක්රියාව අතර කාල පරතරය අතිශයින් කෙටි වන අතර, එය ප්රතිචාර වේගය සහ සංවේදීතාව වැඩි දියුණු කිරීමට හිතකර වේ. සංඛ්යාත්මක පාලන පද්ධතිය.
③එය අධිවේගී රේඛීය චලිතය සඳහා සුදුසු වන අතර, එහි ක්ෂණික වේගය ස්ලයිඩින් මාර්ගෝපදේශ රේල් පීලිවලට වඩා 10 ගුණයකින් වැඩි වේ. ④ එය හිඩැස් රහිත චලනය අවබෝධ කර ගත හැකි අතර යාන්ත්රික පද්ධතියේ චලන දෘඪතාව වැඩි දියුණු කළ හැකිය. ⑤වෘත්තීය නිෂ්පාදකයින් විසින් නිෂ්පාදනය කරන ලද, එය ඉහළ නිරවද්යතාව, හොඳ බහුකාර්යතාව සහ පහසු නඩත්තු ඇත.
5. අක්ෂය ලේසර් පරීක්ෂාව:
Bosman හි සෑම යන්ත්රයක්ම එක්සත් රාජධානියේ RENISHAW සමාගමේ ලේසර් ඉන්ටර්ෆෙරෝමීටරය මගින් ක්රමාංකනය කරනු ලබන්නේ තණතීරුවේ දෝෂය, පසුබෑම, ස්ථානගත කිරීමේ නිරවද්යතාවය, නැවත ස්ථානගත කිරීමේ නිරවද්යතාවය යනාදිය නිවැරදිව පරීක්ෂා කිරීමට සහ වන්දි ගෙවීමට, ගතික, ස්ථිතික ස්ථායිතාව සහ සැකසුම් නිරවද්යතාවය සහතික කිරීම සඳහා ය. යන්ත්රය . බෝල්බාර් පරීක්ෂාව සෑම යන්ත්රයක්ම සත්ය කවයේ නිරවද්යතාවය සහ යන්ත්ර ජ්යාමිතික නිරවද්යතාවය ක්රමාංකනය කිරීම සඳහා බ්රිතාන්ය RENISHAW සමාගමෙන් බෝල්බාරයක් භාවිතා කරයි, සහ යන්ත්රයේ ත්රිමාණ යන්ත්ර නිරවද්යතාවය සහ චක්රලේඛ නිරවද්යතාවය සහතික කිරීම සඳහා එකවර චක්රලේඛ කැපීමේ අත්හදා බැලීම් සිදු කරයි.


6.මැෂින් මෙවලම් පරිසරය:
6.1 උපකරණ භාවිතය පාරිසරික අවශ්යතා
පරිසර උෂ්ණත්වයේ නියත මට්ටමක් පවත්වා ගැනීම නිරවද්ය යන්ත්රෝපකරණ සඳහා අත්යවශ්ය සාධකයකි.
(1) භාවිතා කළ හැකි පරිසර උෂ්ණත්ව අවශ්යතාවය -10 ℃ ~ 35 ℃, පරිසර උෂ්ණත්වය 20 ℃ වන විට, ආර්ද්රතාවය 40 ~ 75% විය යුතුය.
(2) යන්ත්ර මෙවලමෙහි ස්ථිතික නිරවද්යතාව නියමිත පරාසය තුළ තබා ගැනීම සඳහා ප්රශස්ථ පරිසර උෂ්ණත්වය 15°C සිට 25°C දක්වා සහ උෂ්ණත්ව වෙනස අවශ්ය වේ.
±2°C/24h නොඉක්මවිය යුතුය.
6.1.2. බල සැපයුම් වෝල්ටීයතාව: 3 අදියර, 380V, ± 10% වෝල්ටීයතා උච්චාවචනය පරාසය තුළ, බල සැපයුම් සංඛ්යාතය: 50HZ.
6.1.3. භාවිතා කරන ප්රදේශයේ වෝල්ටීයතාවය අස්ථායී නම්, යන්ත්ර උපකරණයේ සාමාන්ය ක්රියාකාරීත්වය සහතික කිරීම සඳහා යන්ත්ර උපකරණය ස්ථාවර බල සැපයුමකින් සමන්විත විය යුතුය.
6.1.4. යන්ත්ර මෙවලමට විශ්වාසදායක භූගත කිරීමක් තිබිය යුතුය: භූගත වයරය තඹ රැහැනකි, වයර් විෂ්කම්භය 10mm² ට නොඅඩු විය යුතු අතර භූගත ප්රතිරෝධය 4 Ω ට වඩා අඩු විය යුතුය.
6.1.5 උපකරණවල සාමාන්ය ක්රියාකාරී ක්රියාකාරිත්වය සහතික කිරීම සඳහා, වායු ප්රභවයේ සම්පීඩිත වාතය වායු ප්රභවයේ අවශ්යතා සපුරාලිය නොහැකි නම්, එය යන්ත්ර මෙවලම මත ස්ථාපනය කළ යුතුය.
වාතයට පෙර වායු ප්රභවය පිරිසිදු කිරීමේ උපකරණ කට්ටලයක් එකතු කරන්න (dehumidification, degreasing, filtering).
6.1.6. යන්ත්ර මෙවලම් නිෂ්පාදනය අසාර්ථක වීම හෝ යන්ත්ර මෙවලම් නිරවද්යතාවය නැතිවීම වළක්වා ගැනීම සඳහා උපකරණ සෘජු හිරු එළිය, කම්පන සහ තාප ප්රභවයන්, අධි-සංඛ්යාත ජනක යන්ත්ර, විදුලි පෑස්සුම් යන්ත්ර ආදියෙන් ඈත් කරන්න.
7. ටීතාක්ෂණික පරාමිතීන්:
| ආකෘතිය | 6025-6Z | |
| වැඩ කොටස් ප්රමාණය සැකසීම | දිග × පළල × උස (මි.මී.) | 6000× 2300×2300 |
| Gantry උපරිම පෝෂණය | පළල (මි.මී.) | 6800 |
| වැඩ කරන මේසයේ ප්රමාණය | දිග X පළල (මි.මී.) | 3000*1000 =4 |
| තීරු ගමන් | තීරුව එහාට මෙහාට ගෙනයාම (මි.මී.) | 7000 |
| ද්විත්ව රැම් එසවීම ඉහළට සහ පහළට | බැටළුවාගේ ඉහළ සහ පහළ පහර (මි.මී.) | 2500 |
| ස්පින්ඩල් මැද සිට මේසය දක්වා තලයට දුර | 0-2500 මි.මී | |
|
තිරස් රැම් වර්ගයේ විදුම් හිස බල හිස එක දෙක
| ප්රමාණය (2) | 2 |
| Spindle taper | BT50 | |
| විදුම් විෂ්කම්භය (මි.මී.) | Φ2-Φ60 | |
| තට්ටු විෂ්කම්භය (මි.මී.) | M3-M30 | |
| ස්පින්ඩල් වේගය (r/min) | 30~5000 | |
| සර්වෝ ස්පින්ඩල් මෝටර් බලය (kw) | 37*2 | |
| ස්පින්ඩල් අන්ත දෙකක් අතර වම් සහ දකුණු ගමන් දුර | 5800-6800 මි.මී | |
| බැටළුවාගේ වම් සහ දකුණු පහර (මි.මී.) | 500 | |
| ද්විපාර්ශ්වික ස්ථානගත කිරීමේ නිරවද්යතාවය | 300mm * 300mm | ± 0.025 |
| ද්වි-දිශාව නැවත නැවත ස්ථානගත කිරීමේ නිරවද්යතාවය | 300mm * 300mm | ± 0.02 |
| යන්ත්ර මෙවලම් මානයන් | දිග × පළල × උස (මි.මී.) | චිත්රවලට අනුව (සැලසුම් ක්රියාවලියේ වෙනස්කම් තිබේ නම්, අපි ඔබට දැනුම් දෙන්නෙමු) |
| දළ බර (t) | 72T | |