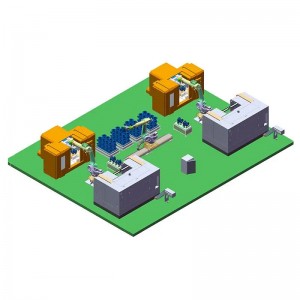
Soft Gate Valve නිෂ්පාදන රේඛාව


1.ක්රියාකරු විසින් ස්ථානගත කිරීම සඳහා loading positioning slot 1 සහ loading positioning slot 2 හි කපාට බඳ වැඩ කොටස් වලින් පිරුණු pallet එක තබයි, සහ loading positioning slot 1 හි හිස් තැටිය සහ ස්ථානගත කිරීම සඳහා unloading positioning slot 2 තබයි.
2.රොබෝ 1 හි ඇති කැමරාව වැඩ කොටස නිවැරදිව ස්ථානගත කිරීම සඳහා පෝෂණ ස්ථානගත කිරීමේ ස්ලොට් 1 හි ඇති තට්ටුවේ වැඩ කොටස පරිලෝකනය කරයි, සහ වැඩ කොටස 1 තද කර බෆර වගුව 1 හි ස්ථානගත කිරීමේ සවිකිරීමේ තබා ඇත.
ඒ සමඟම, එය සැකසූ වැඩ කොටස 3 ග්රහණය කර ගනී (රොබෝ 2 එය යන්ත්ර මෙවලම 2 වෙතින් එය ග්රහණය කර ඇත), බෑමේ ස්ථානගත කිරීමේ ස්ලොට් 1 වෙත ගෙන ගොස් අවශ්ය පරිදි එය පැලට් එකේ පිළිවෙලට තබයි.
රොබෝ 1 හි ඇති කැමරාව වැඩ කොටස නිවැරදිව ස්ථානගත කිරීම සඳහා පෝෂණ ස්ථානගත කිරීමේ ස්ලොට් 2 හි ඇති තට්ටුවේ ඇති වැඩ කොටස පරිලෝකනය කරයි, සහ වැඩ කොටස 4 තද කර බෆර වගුව 2 හි ස්ථානගත කිරීමේ සවිකිරීමේ තබා ඇත.
ඒ සමඟම, එය සැකසූ වැඩ කොටස 6 ග්රහණය කර ගනී (රොබෝ 3 එය යන්ත්ර මෙවලම 4 වෙතින් ග්රහණය කර ඇත), බෑමේ ස්ථානගත කිරීමේ ස්ලට් 2 වෙත ගෙන ගොස් අවශ්ය පරිදි එය පැලට් එකේ පිළිවෙලට තබයි.
3.රොබෝ 2 බෆර වගුව 1 සිට වැඩ කොටස 1 තද කර යන්ත්ර මෙවලම 1 වෙත දිව යයි, නිමි වැඩ කොටස 2 ග්රහණය කර වැඩ කොටස 1 තද කරයි, යන්ත්ර මෙවලම 2 වෙත දිව යයි, නිමි වැඩ කොටස 3 අල්ලාගෙන වැඩ කොටස 2 තද කරයි. , සහ බෆර් වගුව වෙත දිව යයි 1. වැඩ කොටස තබන්න 3. රොබෝ 2 චක්රය සම්පූර්ණ කරයි.
4.රොබෝ 3 බෆරින් වගුව 2 වෙතින් වැඩ කොටස 4 ග්රහණය කර යන්ත්ර මෙවලම 3 වෙත දිව යයි, නිමි වැඩ කොටස 5 ග්රහණය කර වැඩ කොටස 4 ක්ලැප් කරයි, යන්ත්ර මෙවලම 4 වෙත දිව යයි, නිමි වැඩ කොටස 6 ග්රහණය කර වැඩ කොටස 5 තද කරයි. , සහ බෆර් වගුව වෙත දිව යයි 2. වැඩ කොටස තබන්න 6. රොබෝ 3 චක්රය සම්පූර්ණ කරයි.