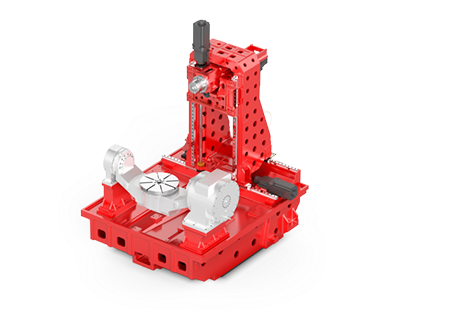
අක්ෂ පහක තිරස් යන්ත්ර මධ්යස්ථානය+A ශ්රේණිය






විශේෂාංග
කාර්ය සාධන වාසි
1. සම්පුර්ණ කරන ලද යන්ත්රය චලනය වන තීරු ව්යුහයක් භාවිතා කරයි, මෙවලම අක්ෂ තුනකින් චලනය වේ, සහ වැඩ කොටස අක්ෂ දෙකකින් භ්රමණය වන අතර එමඟින් අක්ෂ පහක සම්බන්ධය අවබෝධ කර ගත හැකිය.
2. සැහැල්ලු නිර්මාණය, රේඛීය අක්ෂය 90M/min වේගවත් විස්ථාපනය. ත්වරණය 0.8G
3. A-අක්ෂය සහ අක්ෂය යන දෙකම සෘජු ධාවක ව්යුහය, ශුන්ය සම්ප්රේෂණ දාමය, ශුන්ය ප්රතිලෝම නිෂ්කාශනය, හොඳ දෘඪතාව; අධි-නිරවද්ය කෝණ කේතකය නිවැරදි ස්ථානගත කිරීම අවබෝධ කරයි
4. ඇඳ T-හැඩය, X-අක්ෂය පියවරෙන් පියවර මාර්ගෝපදේශක රේල් එකක සකස් කර ඇත, චලනය වන කොටස් සැහැල්ලු ය, සහ බල තත්ත්වය හොඳයි:
5. ස්පින්ඩලය අධිවේගී විදුලි දඟරයක්, වේගවත් වේගයක්, අඩු ශබ්දයක් භාවිතා කරයි: රේඛීය අක්ෂ රෝලර් මාර්ගෝපදේශ රේල් 6 ක්. අඩු ඝර්ෂණය, ඉහළ දෘඪතාව;
සුදුසු ආකෘතිය A5 A8 A13
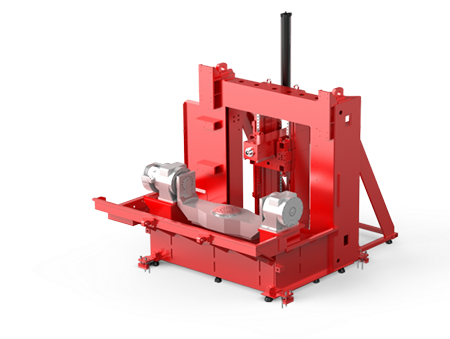
කාර්ය සාධන වාසි
1. සැහැල්ලු මෝස්තරය, සෘජු ධාවක මෝටර් යෙදුම, ඉහළම වේගවත් විස්ථාපනය ළඟා විය හැකිය
120m/min, වේගවත්ම වේගය 1Gh;
2. තිරස් යන්ත්ර මෙවලම් ගැන්ට්රි යන්ත්ර මෙවලම්, පහසු නඩත්තුව, පහසු පැටවීම, සුමට චිප් ඉවත් කිරීම සහ අනෙකුත් ව්යුහාත්මක වාසිවලට වඩා හොඳ විවෘත බවක් ඇත:
3. තිරස් ද්විත්ව අක්ෂ පහක යන්ත්රෝපකරණ මධ්යස්ථානය, ස්වාධීන වම් සහ දකුණු ත්රි-ඛණ්ඩාංක ඒකක සවිකිරීමේ දෙපසම බෙදා හරිනු ලැබේ, බාධා කිරීම් සහ ගැටීමේ අවදානමකින් තොරව, පැති දෙකක එකවර සැකසීම උපරිම කර සැකසීමේ කාර්යක්ෂමතාව වැඩි දියුණු කළ හැකිය:
4. CNC පද්ධති කට්ටලයකින් පාලනය වන, සරල ක්රමලේඛනය, ඉහළ නම්යශීලී බව, සහ සවිකිරීම ප්රතිස්ථාපනය කිරීමෙන් බහුවිධ කොටස් සැකසීමට අනුගත විය හැක:
5. A-අක්ෂ (තොටිල්ල) හැරවුම් මේසය සමඟ, කොටස්වල ඉදිරිපස සහ පසුපස පැතිවල සැකසුම් ඉරියව්ව පරිවර්තනය කිරීම සඳහා භාවිතා වේ. ඒ අතරම, A-axis turntable මඟින් චිප් එකතු කිරීමේ කරදරයකින් තොරව සවිකෘත ස්ථානගත කිරීමේ මතුපිට පිරිසිදු කිරීම සහ ආපසු හැරවීම පහසුවෙන් අවබෝධ කර ගත හැකි අතර ස්වයංක්රීයකරණයේ විශ්වසනීයත්වය සහතික කිරීම පහසුය.
6. විශාල ආනති කෝණ ව්යුහාත්මක සැලසුම, යන්ත්ර මෙවලමෙහි මළ කෝණ ඉසින සමඟ ඒකාබද්ධව, හොඳම චිප් ඉවත් කිරීමේ බලපෑම ලබා ගැනීමට යන්ත්ර මෙවලමට හැකියාව ලබා දෙයි.
සුදුසු ආකෘතිය A15L A20L
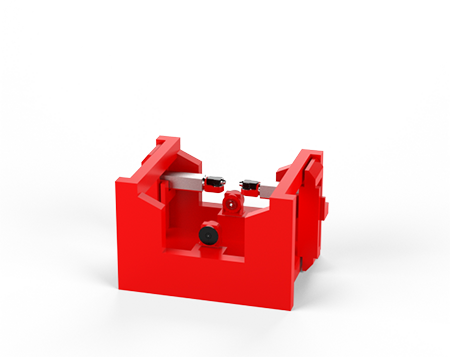
කාර්ය සාධන වාසි
1. සම්පූර්ණ යන්ත්රය තිරස් ද්විත්ව අක්ෂ පහක තොටිල්ලේ ව්යුහයක් භාවිතා කරයි:
2. හොඳ දෘඪතාව
සුදුසු ආකෘතිය A25L
Master Core Technology, Independent R & D Spindle
CATO masters core තාක්ෂණය, ස්පින්ඩල් නිර්මාණය කිරීමේ හැකියාව ඇත,නිෂ්පාදනය සහ එකලස් කිරීම, නියත උෂ්ණත්ව වැඩමුළුවක් ඇත1000m2, මොඩියුලර් කෙට්ටු නිෂ්පාදන මාදිලිය භාවිතා කරයි. CATO ස්පින්ඩලය ඉහළයිදෘඪතාව, අධික වේගය, අධි බලය, ඉහළ ව්යවර්ථය සහ ඉහළ. විශ්වසනීයත්වය සහවෙනත් ලක්ෂණ.
ස්වයං-සංවර්ධිත HSK E40/HSK A63/HSK A100 බිල්ට් ස්පින්ඩලය.
ස්පින්ඩල් භ්රමණ පරාසය තුළ ඇති වන කම්පනය සහ කම්පනය ඉවත් කරයි, සහඅධිවේගී දිගු කාලීන යන්ත්රකරණයේ ස්ථාවර නිරවද්යතාවයක් ලබා ගනී. දස්පින්ඩල් මෝටරය සහ ඉදිරිපස සහ පසුපස සිසිල් කිරීම සඳහා බලහත්කාරයෙන් සිසිලනය භාවිතා කරයිෙබයාරිං.

මෝටර් ව්යුහය තුළ ඉදිකර ඇත
රියදුරු ආම්පන්න ඉවත් කිරීමෙන්, අධිවේගී භ්රමණය විය හැකminimizedIt යන්ත්රෝපකරණ මතුපිට නිරවද්යතාවය වැඩි දියුණු කළ හැකියකපනයෙහි ආයු කාලය දීර්ඝ කරන්න
ස්පින්ඩල් උෂ්ණත්ව කළමනාකරණය
උෂ්ණත්වය කළමනාකරණය කරන ලද සිසිලන තෙල්, the Thermal සංසරණය කිරීමෙන්උනුසුම් වීම නිසා ඇති වන ස්පින්ඩලය විස්ථාපනය වීම වළක්වා ගත හැකියයන්ත්රෝපකරණ නිරවද්යතාව වෙනස් කිරීම.
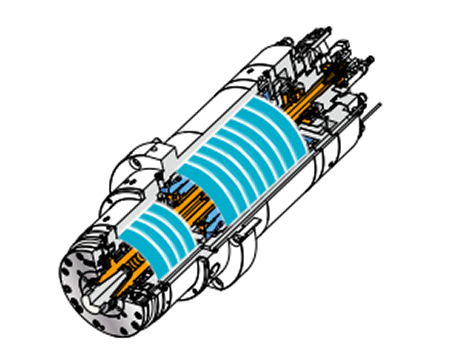
අධිවේගී සමකාලීන අක්ෂ දෙකක ඇඹරුම් හිස
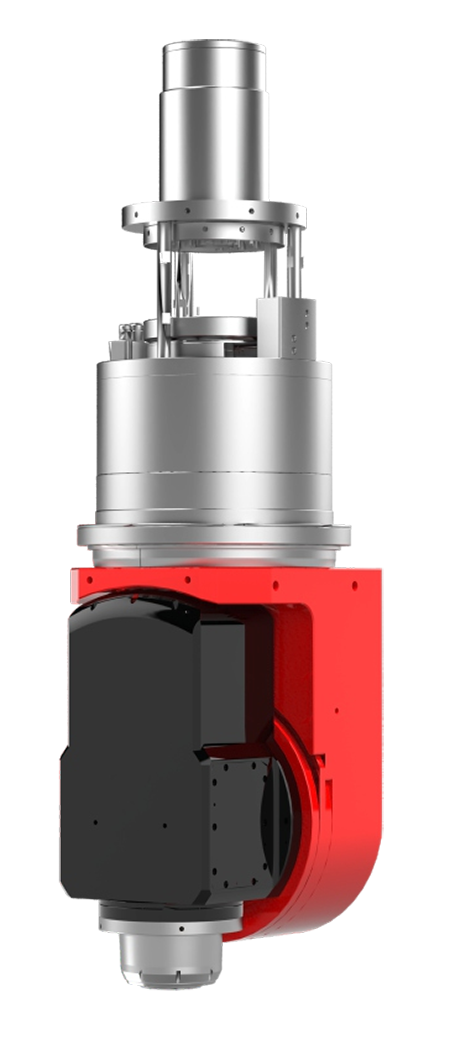
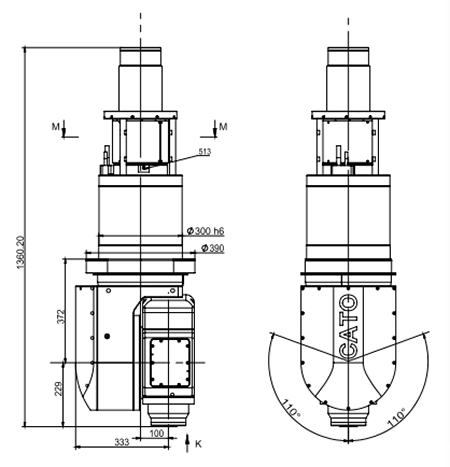
තාක්ෂණික පිරිවිතර
| ව්යාපෘතිය | ඒකකය | A13 | A13+a | A13+b | |
| සංචාරය කරන්න | X/Y/Z අක්ෂ ගමන් | mm | 1300/850/650 | 1300/850/650 | 1300/850/650 |
| ස්පින්ඩල් කේන්ද්රයේ සිට A අක්ෂ භ්රමණ මධ්යස්ථානය දක්වා ඇති දුර (Y දිශාව) | mm | -10-840 | ±425 | \ | |
| දඟර අග මුහුණේ සිට A අක්ෂ භ්රමණ මධ්යස්ථානයට ඇති දුර (Z දිශාව) | mm | 120-770 | 230-880 | \ | |
| B අක්ෂ තැටියේ සිට A අක්ෂ භ්රමණ මධ්යස්ථානයට ඇති දුර | mm | 60 | \ | \ | |
| ස්පින්ඩල් මධ්යයේ සිට වැඩ මේසයේ මතුපිටට ඇති දුර (Y දිශාව) | mm | \ | \ | 160-1010 | |
| දඟර අග මුහුණේ සිට B අක්ෂ භ්රමණ මධ්යස්ථානයට ඇති දුර (Z දිශාව) | mm | \ | \ | 120-770 | |
| B අක්ෂයේ උපරිම භ්රමණ විෂ්කම්භය | mm | 1400 | \ | 1600 | |
| A අක්ෂයේ උපරිම භ්රමණ විෂ්කම්භය | mm | 1450 | 1200 | \ | |
| ස්පින්ඩල් | ස්පින්ඩල් පිරිවිතර (ස්ථාපන විෂ්කම්භය/සම්ප්රේෂණ මාදිලිය) | mm | 190/බිල්ට්-ඉන් | 190/බිල්ට්-ඉන් | 190/බිල්ට්-ඉන් |
| Spindle taper | mm | A63 | A63 | A63 | |
| ස්පින්ඩල් උපරිම වේගය | r/min | 16000 | 16000 | 16000 | |
| Spindle motor ශ්රේණිගත බලය | kW | 30KW | 30KW | 30KW | |
| ස්පින්ඩල් ශ්රේණිගත ව්යවර්ථය | Nm | 72 | 72 | 72 | |
| තුන්-අක්ෂය | X/Y/Z අක්ෂය වේගවත් විස්ථාපනය | m/min | 90/90/90 | 90/90/90 | 90/90/90 |
| අක්ෂීය ත්වරණය | m/S² | 8/8/8 | 8/8/8 | 8/8/8 | |
| ස්ථානගත කිරීමේ නිරවද්යතාවය | mm | 0.015/0.008/0.008 | 0.015/0.008/0.008 | 0.015/0.008/0.008 | |
| නැවත ස්ථානගත කිරීමේ නිරවද්යතාවය | mm | 0.012/0.006/0.006 | 0.012/0.006/0.006 | 0.012/0.006/0.006 | |
| හැරවිය හැකි | තැටි විෂ්කම්භය | mm | 420pස්ථානගත කිරීමේ තහඩුව | \ | 600*600 |
| අවසර ලත් පැටවීම | kg | 1000 | 1000 | 1000 | |
| A-අක්ෂ ගමන් | ° | +90°~-180° | 360° | \ | |
| B-අක්ෂ ගමන් | 0 | 360° | \ | 360° | |
| A-අක්ෂයේ උපරිම වේගය | rpm | 40 | 40 | \ | |
| B-අක්ෂයේ උපරිම වේගය | rpm | 40 | \ | 40 | |
| ස්ථානගත කිරීමේ නිරවද්යතාවයක් / නැවත නැවත ස්ථානගත කිරීමේ නිරවද්යතාවයක් | arc.sec | 10/6 | 10/6 | \ | |
| B ස්ථානගත කිරීමේ නිරවද්යතාවය / නැවත නැවත ස්ථානගත කිරීමේ නිරවද්යතාවය | arc.sec | 8/4 | \ | 8/4 | |
| මෙවලම් සඟරාව | මෙවලම් සඟරා ධාරිතාව | T | 41T | 41T | 41T |
| මෙවලම් හුවමාරු කාලය (TT) | S | 5 | 5 | 5 | |
| උපරිම මෙවලම් විෂ්කම්භය (සම්පූර්ණ මෙවලම/හිස් මෙවලම) | mm | 80/125 | 80/125 | 80/125 | |
| උපරිම මෙවලම් දිග | mm | 390 | 390 | 390 | |
| උපරිම මෙවලම් බර | kg | 8 | 8 | 8 | |
| ව්යාපෘතිය | ඒකකය | A15L | A15L+a | A15L+b | |
| සංචාරය කරන්න | X/Y/Z අක්ෂ ගමන් | mm | 1500/1000/650 | 1500/1000/650 | 1500/1000/650 |
| ස්පින්ඩල් කේන්ද්රයේ සිට A අක්ෂ භ්රමණ මධ්යස්ථානය දක්වා ඇති දුර (Y දිශාව) | mm | -250~750 | ±500 | \ | |
| දඟර අග මුහුණේ සිට A අක්ෂ භ්රමණ මධ්යස්ථානයට ඇති දුර (Z දිශාව) | mm | 350-1000 කි | 300-950 කි | \ | |
| B අක්ෂ තැටියේ සිට A අක්ෂ භ්රමණ මධ්යස්ථානයට ඇති දුර | mm | 150 | \ | \ | |
| ස්පින්ඩල් මධ්යයේ සිට වැඩ මේසයේ මතුපිටට ඇති දුර (Y දිශාව) | mm | \ | \ | 200-1200 කි | |
| දඟර අග මුහුණේ සිට B අක්ෂ භ්රමණ මධ්යස්ථානයට ඇති දුර (Z දිශාව) | mm | \ | \ | 300-950 කි | |
| B අක්ෂයේ උපරිම භ්රමණ විෂ්කම්භය | mm | 1800 | \ | 1700 | |
| A අක්ෂයේ උපරිම භ්රමණ විෂ්කම්භය | mm | 1960 | 1500 | \ | |
| ස්පින්ඩල් | ස්පින්ඩල් පිරිවිතර (ස්ථාපන විෂ්කම්භය/සම්ප්රේෂණ මාදිලිය) | mm | 210/බිල්ට්-ඉන් | 210/බිල්ට්-ඉන් | 210/බිල්ට්-ඉන් |
| Spindle taper | mm | A100 | A100 | A100 | |
| ස්පින්ඩල් උපරිම වේගය | r/min | 8000 | 8000 | 8000 | |
| Spindle motor ශ්රේණිගත බලය | kW | 31.4KW | 31.4KW | 31.4KW | |
| ස්පින්ඩල් ශ්රේණිගත ව්යවර්ථය | Nm | 150 | 150 | 150 | |
| තුන්-අක්ෂය | X/Y/Z අක්ෂය වේගවත් විස්ථාපනය | m/min | 100/100/100 | 100/100/100 | 100/100/100 |
| අක්ෂීය ත්වරණය | m/S² | 10/10/10 | 10/10/10 | 10/10/10 | |
| ස්ථානගත කිරීමේ නිරවද්යතාවය | mm | 0.01/0.01/0.008 | 0.01/0.01/0.008 | 0.01/0.01/0.008 | |
| නැවත ස්ථානගත කිරීමේ නිරවද්යතාවය | mm | 0.008/0.008/0.006 | 0.008/0.008/0.006 | 0.008/0.008/0.006 | |
| හැරවිය හැකි | තැටි විෂ්කම්භය | mm | 420pස්ථානගත කිරීමේ තහඩුව | \ | 800*800 |
| අවසර ලත් පැටවීම | kg | 1500 | 1500 | 1500 | |
| A-අක්ෂ ගමන් | ° | +90°~-180° | 360° | \ | |
| B-අක්ෂ ගමන් | 0 | 360° | \ | 360° | |
| A-අක්ෂයේ උපරිම වේගය | rpm | 40 | 40 | \ | |
| B-අක්ෂයේ උපරිම වේගය | rpm | 40 | \ | 40 | |
| ස්ථානගත කිරීමේ නිරවද්යතාවයක් / නැවත නැවත ස්ථානගත කිරීමේ නිරවද්යතාවයක් | arc.sec | 10/6 | 10/6 | \ | |
| B ස්ථානගත කිරීමේ නිරවද්යතාවය / නැවත නැවත ස්ථානගත කිරීමේ නිරවද්යතාවය | arc.sec | 8/4 | \ | 8/4 | |
| මෙවලම් සඟරාව | මෙවලම් සඟරා ධාරිතාව | T | 72T | 72T | 72T |
| මෙවලම් හුවමාරු කාලය (TT) | S | 5 | 5 | 5 | |
| උපරිම මෙවලම් විෂ්කම්භය (සම්පූර්ණ මෙවලම/හිස් මෙවලම) | mm | 110/300 | 110/300 | 110/300 | |
| උපරිම මෙවලම් දිග | mm | 550 | 550 | 550 | |
| උපරිම මෙවලම් බර | kg | 20 | 20 | 20 | |
තාක්ෂණික පිරිවිතර
| ව්යාපෘතිය | ඒකකය | A20L | A20L+a | A20L+b | |
| සංචාරය කරන්න | X/Y/Z අක්ෂ ගමන් | mm | 2000/1500/85C | 2000/1500/850 | 2000/1500/850 |
| ස්පින්ඩල් කේන්ද්රයේ සිට A අක්ෂ භ්රමණ මධ්යස්ථානය දක්වා ඇති දුර (Y දිශාව) | mm | -750~750 | ±750 | \ | |
| දඟර අග මුහුණේ සිට A අක්ෂ භ්රමණ මධ්යස්ථානයට ඇති දුර (Z දිශාව) | mm | 150-1000 කි | 150-1000 කි | \ | |
| B අක්ෂ තැටියේ සිට A අක්ෂ භ්රමණ මධ්යස්ථානයට ඇති දුර | mm | \ | \ | \ | |
| ස්පින්ඩල් මධ්යයේ සිට වැඩ මේසයේ මතුපිටට ඇති දුර (Y දිශාව) | mm | \ | \ | 200-1700 | |
| දඟර අග මුහුණේ සිට B අක්ෂ භ්රමණ මධ්යස්ථානයට ඇති දුර (Z දිශාව) | mm | \ | \ | 200-1200 කි | |
| B අක්ෂයේ උපරිම භ්රමණ විෂ්කම්භය | mm | \ | \ | \ | |
| A අක්ෂයේ උපරිම භ්රමණ විෂ්කම්භය | mm | \ | 1800 | \ | |
| ස්පින්ඩල් | ස්පින්ඩල් පිරිවිතර (ස්ථාපන විෂ්කම්භය/සම්ප්රේෂණ මාදිලිය) | mm | 210/බිල්ට්-ඉන් | 210/බිල්ට්-ඉන් | 210/බිල්ට්-ඉන් |
| Spindle taper | mm | A100 | A100 | A100 | |
| ස්පින්ඩල් උපරිම වේගය | r/min | 8000 | 8000 | 8000 | |
| Spindle motor ශ්රේණිගත බලය | kW | 31.4 | 31.4 | 31.4 | |
| ස්පින්ඩල් ශ්රේණිගත ව්යවර්ථය | Nm | 150 | 150 | 150 | |
| තුන්-අක්ෂය | X/Y/Z අක්ෂය වේගවත් විස්ථාපනය | m/min | 100/100/100 | 100/100/100 | 100/100/100 |
| අක්ෂීය ත්වරණය | m/S² | 10/10/10 | 10/10/10 | 10/10/10 | |
| ස්ථානගත කිරීමේ නිරවද්යතාවය | mm | 0.012/0.01/0.008 | 0.012/0.01/0.008 | 0.012/0.01/0.008 | |
| නැවත ස්ථානගත කිරීමේ නිරවද්යතාවය | mm | 0.008/0.008/0.006 | 0.008/0.008/0.006 | 0.008/0.008/0.006 | |
| පස් අක්ෂ හිස | B-අක්ෂ ගමන් (අක්ෂ පහේ හිස) | ° | \ | \ | \ |
| C-අක්ෂ ගමන් (අක්ෂ පහේ හිස) | ° | \ | \ | \ | |
| B-අක්ෂයේ උපරිම වේගය (අක්ෂ පහේ හිස) | rpm | \ | \ | \ | |
| C-අක්ෂයේ උපරිම වේගය (අක්ෂ පහේ හිස) | rpm | \ | \ | \ | |
| අක්ෂ පහේ හිස ස්ථානගත කිරීමේ නිරවද්යතාවය B/C | arc.sec | \ | \ | \ | |
| පස්-අක්ෂ හිස පුනරාවර්තන හැකියාව | arc.sec | \ | \ | \ | |
| හැරවිය හැකි | තැටි විෂ්කම්භය | mm | 420 ස්ථානගත කිරීමේ තහඩුව | \ | \ |
| අවසර ලත් පැටවීම | kg | 2000 | 2000 | 2000 | |
| A-අක්ෂ ගමන් | ° | 90~-180 | 360° | \ | |
| B-අක්ෂ ගමන් | 0 | 360° | \ | 360° | |
| A-අක්ෂයේ උපරිම වේගය | rpm | 40 | 40 | \ | |
| B-අක්ෂයේ උපරිම වේගය | rpm | 40 | \ | 40 | |
| ස්ථානගත කිරීමේ නිරවද්යතාවයක් / නැවත නැවත ස්ථානගත කිරීමේ නිරවද්යතාවයක් | arc.sec | 10/6 | 10/6 | \ | |
| B ස්ථානගත කිරීමේ නිරවද්යතාවය / නැවත නැවත ස්ථානගත කිරීමේ නිරවද්යතාවය | arc.sec | 8/4 | \ | 8/4 | |
| මෙවලම් සඟරාව | මෙවලම් සඟරා ධාරිතාව | T | 72 | 72 | 72 |
| මෙවලම් හුවමාරු කාලය (TT) | S | 5 | 5 | 5 | |
| උපරිම මෙවලම් විෂ්කම්භය (සම්පූර්ණ මෙවලම/හිස් මෙවලම) | mm | 110/300 | 110/300 | 110/300 | |
| උපරිම මෙවලම් දිග | mm | 470 | 470 | 470 | |
| උපරිම මෙවලම් බර | kg | 20 | 20 | 20 | |
| ව්යාපෘතිය | ඒකකය | A15L | A15L+a | A15L+b | |
| සංචාරය කරන්න | X/Y/Z අක්ෂ ගමන් | mm | 1500/1000/650 | 1500/1000/650 | 1500/1000/650 |
| ස්පින්ඩල් කේන්ද්රයේ සිට A අක්ෂ භ්රමණ මධ්යස්ථානය දක්වා ඇති දුර (Y දිශාව) | mm | -250-750 | ±500 | \ | |
| දඟර අග මුහුණේ සිට A අක්ෂ භ්රමණ මධ්යස්ථානයට ඇති දුර (Z දිශාව) | mm | 350-1000 කි | 300-950 කි | \ | |
| B අක්ෂ තැටියේ සිට A අක්ෂ භ්රමණ මධ්යස්ථානයට ඇති දුර | mm | 150 | \ | \ | |
| ස්පින්ඩල් මධ්යයේ සිට වැඩ මේසයේ මතුපිටට ඇති දුර (Y දිශාව) | mm | \ | \ | 200-1200 කි | |
| දඟර අග මුහුණේ සිට B අක්ෂ භ්රමණ මධ්යස්ථානයට ඇති දුර (Z දිශාව) | mm | \ | \ | 300-950 කි | |
| B අක්ෂයේ උපරිම භ්රමණ විෂ්කම්භය | mm | 1800 | \ | 1700 | |
| A අක්ෂයේ උපරිම භ්රමණ විෂ්කම්භය | mm | 1960 | 1500 | \ | |
| ස්පින්ඩල් | ස්පින්ඩල් පිරිවිතර (ස්ථාපන විෂ්කම්භය/සම්ප්රේෂණ මාදිලිය) | mm | 210/බිල්ට්-ඉන් | 210/බිල්ට්-ඉන් | 210/බිල්ට්-ඉන් |
| Spindle taper | mm | A100 | A100 | A100 | |
| ස්පින්ඩල් උපරිම වේගය | r/min | 8000 | 8000 | 8000 | |
| Spindle motor ශ්රේණිගත බලය | kW | 31.4KW | 31.4KW | 31.4KW | |
| ස්පින්ඩල් ශ්රේණිගත ව්යවර්ථය | Nm | 150 | 150 | 150 | |
| තුන්-අක්ෂය | X/Y/Z අක්ෂය වේගවත් විස්ථාපනය | m/min | 100/100/100 | 100/100/100 | 100/100/100 |
| අක්ෂීය ත්වරණය | m/S² | 10/10/10 | 10/10/10 | 10/10/10 | |
| ස්ථානගත කිරීමේ නිරවද්යතාවය | mm | 0.01/0.01/0.008 | 0.01/0.01/0.008 | 0.01/0.01/0.008 | |
| නැවත ස්ථානගත කිරීමේ නිරවද්යතාවය | mm | 0.008/0.008/0.006 | 0.008/0.008/0.006 | 0.008/0.008/0.006 | |
| හැරවිය හැකි | තැටි විෂ්කම්භය | mm | 420 ස්ථානගත කිරීමේ තහඩුව | \ | 800*800 |
| අවසර ලත් පැටවීම | kg | 1500 | 1500 | 1500 | |
| A-අක්ෂ ගමන් | ° | +90°~-180° | 360° | \ | |
| B-අක්ෂ ගමන් | 0 | 360° | \ | 360° | |
| A-අක්ෂයේ උපරිම වේගය | rpm | 40 | 40 | \ | |
| B-අක්ෂයේ උපරිම වේගය | rpm | 40 | \ | 40 | |
| ස්ථානගත කිරීමේ නිරවද්යතාවයක් / නැවත නැවත ස්ථානගත කිරීමේ නිරවද්යතාවයක් | arc.sec | 10/6 | 10/6 | \ | |
| B ස්ථානගත කිරීමේ නිරවද්යතාවය / නැවත නැවත ස්ථානගත කිරීමේ නිරවද්යතාවය | arc.sec | 8/4 | \ | 8/4 | |
| මෙවලම් සඟරාව | මෙවලම් සඟරා ධාරිතාව | T | 72T | 72T | 72T |
| මෙවලම් හුවමාරු කාලය (TT) | S | 5 | 5 | 5 | |
| උපරිම මෙවලම් විෂ්කම්භය (සම්පූර්ණ මෙවලම/හිස් මෙවලම) | mm | 110/300 | 110/300 | 110/300 | |
| උපරිම මෙවලම් දිග | mm | 550 | 550 | 550 | |
| උපරිම මෙවලම් බර | kg | 20 | 20 | 20 | |
තාක්ෂණික පිරිවිතර
| ව්යාපෘතිය | ඒකකය | A20L | A20L+a | A20L+b | |
| සංචාරය කරන්න | X/Y/Z අක්ෂ ගමන් | mm | 2000/1500/85C | 2000/1500/850 | 2000/1500/850 |
| ස්පින්ඩල් කේන්ද්රයේ සිට A අක්ෂ භ්රමණ මධ්යස්ථානය දක්වා ඇති දුර (Y දිශාව) | mm | -750~750 | ±750 | \ | |
| දඟර අග මුහුණේ සිට A අක්ෂ භ්රමණ මධ්යස්ථානයට ඇති දුර (Z දිශාව) | mm | 150-1000 කි | 150-1000 කි | \ | |
| B අක්ෂ තැටියේ සිට A අක්ෂ භ්රමණ මධ්යස්ථානයට ඇති දුර | mm | \ | \ | \ | |
| ස්පින්ඩල් මධ්යයේ සිට වැඩ මේසයේ මතුපිටට ඇති දුර (Y දිශාව) | mm | \ | \ | 200-1700 | |
| දඟර අග මුහුණේ සිට B අක්ෂ භ්රමණ මධ්යස්ථානයට ඇති දුර (Z දිශාව) | mm | \ | \ | 200-1200 කි | |
| B අක්ෂයේ උපරිම භ්රමණ විෂ්කම්භය | mm | \ | \ | \ | |
| A අක්ෂයේ උපරිම භ්රමණ විෂ්කම්භය | mm | \ | 1800 | \ | |
| ස්පින්ඩල් | ස්පින්ඩල් පිරිවිතර (ස්ථාපන විෂ්කම්භය/සම්ප්රේෂණ මාදිලිය) | mm | 210/බිල්ට්-ඉන් | 210/බිල්ට්-ඉන් | 210/බිල්ට්-ඉන් |
| Spindle taper | mm | A100 | A100 | A100 | |
| ස්පින්ඩල් උපරිම වේගය | r/min | 8000 | 8000 | 8000 | |
| Spindle motor ශ්රේණිගත බලය | kW | 31.4 | 31.4 | 31.4 | |
| ස්පින්ඩල් ශ්රේණිගත ව්යවර්ථය | Nm | 150 | 150 | 150 | |
| තුන්-අක්ෂය | X/Y/Z අක්ෂය වේගවත් විස්ථාපනය | m/min | 100/100/100 | 100/100/100 | 100/100/100 |
| අක්ෂීය ත්වරණය | m/S² | 10/10/10 | 10/10/10 | 10/10/10 | |
| ස්ථානගත කිරීමේ නිරවද්යතාවය | mm | 0.012/0.01/0.008 | 0.012/0.01/0.008 | 0.012/0.01/0.008 | |
| නැවත ස්ථානගත කිරීමේ නිරවද්යතාවය | mm | 0.008/0.008/0.006 | 0.008/0.008/0.006 | 0.008/0.008/0.006 | |
| පස් අක්ෂ හිස | B-අක්ෂ ගමන් (අක්ෂ පහේ හිස) | ° | \ | \ | \ |
| C-අක්ෂ ගමන් (අක්ෂ පහේ හිස) | ° | \ | \ | \ | |
| B-අක්ෂයේ උපරිම වේගය (අක්ෂ පහේ හිස) | rpm | \ | \ | \ | |
| C-අක්ෂයේ උපරිම වේගය (අක්ෂ පහේ හිස) | rpm | \ | \ | \ | |
| අක්ෂ පහේ හිස ස්ථානගත කිරීමේ නිරවද්යතාවය B/C | arc.sec | \ | \ | \ | |
| පස්-අක්ෂ හිස පුනරාවර්තන හැකියාව | arc.sec | \ | \ | \ | |
| හැරවිය හැකි
| තැටි විෂ්කම්භය | mm | 420pස්ථානගත කිරීමේ තහඩුව | \ | \ |
| අවසර ලත් පැටවීම | kg | 2000 | 2000 | 2000 | |
| A-අක්ෂ ගමන් | ° | 90~-180 | 360° | \ | |
| B-අක්ෂ ගමන් | 0 | 360° | \ | 360° | |
| A-අක්ෂයේ උපරිම වේගය | rpm | 40 | 40 | \ | |
| B-අක්ෂයේ උපරිම වේගය | rpm | 40 | \ | 40 | |
| ස්ථානගත කිරීමේ නිරවද්යතාවයක් / නැවත නැවත ස්ථානගත කිරීමේ නිරවද්යතාවයක් | arc.sec | 10/6 | 10/6 | \ | |
| B ස්ථානගත කිරීමේ නිරවද්යතාවය / නැවත නැවත ස්ථානගත කිරීමේ නිරවද්යතාවය | arc.sec | 8/4 | \ | 8/4 | |
| මෙවලම් සඟරාව | මෙවලම් සඟරා ධාරිතාව | T | 72 | 72 | 72 |
| මෙවලම් හුවමාරු කාලය (TT) | S | 5 | 5 | 5 | |
| උපරිම මෙවලම් විෂ්කම්භය (සම්පූර්ණ මෙවලම/හිස් මෙවලම) | mm | 110/300 | 110/300 | 110/300 | |
| උපරිම මෙවලම් දිග | mm | 470 | 470 | 470 | |
| උපරිම මෙවලම් බර | kg | 20 | 20 | 20 | |
| ව්යාපෘතිය | ඒකකය | A25L+a | A25L+b | A20LS+a | |
| සංචාරය කරන්න | X/Y/Z අක්ෂ ගමන් | mm | 2500/1500/1000 | 2500/1500/1000 | 2000/1500/850 |
|
| ස්පින්ඩල් කේන්ද්රයේ සිට A අක්ෂ භ්රමණ මධ්යස්ථානය දක්වා ඇති දුර (Y දිශාව) | mm | ±750 | \ | ±750 |
|
| දඟර අග මුහුණේ සිට A අක්ෂ භ්රමණ මධ්යස්ථානයට ඇති දුර (Z දිශාව) | mm | 150 | \ | 150-1000 කි |
|
| B අක්ෂ තැටියේ සිට A අක්ෂ භ්රමණ මධ්යස්ථානයට ඇති දුර | mm | \ | \ | \ |
|
| ස්පින්ඩල් මධ්යයේ සිට වැඩ මේසයේ මතුපිටට ඇති දුර (Y දිශාව) | mm | \ | 200-1700 | \ |
|
| දඟර අග මුහුණේ සිට B අක්ෂ භ්රමණ මධ්යස්ථානයට ඇති දුර (Z දිශාව) | mm | \ | 200-1200 කි | \ |
|
| B අක්ෂයේ උපරිම භ්රමණ විෂ්කම්භය | mm | \ | 2000 | \ |
|
| A අක්ෂයේ උපරිම භ්රමණ විෂ්කම්භය | mm | 2000 | \ | 1800 |
| ස්පින්ඩල් | ස්පින්ඩල් පිරිවිතර (ස්ථාපන විෂ්කම්භය/සම්ප්රේෂණ මාදිලිය) | mm | 210/බිල්ට්-ඉන් | 210/බිල්ට්-ඉන් | පස් අක්ෂ හිස |
|
| Spindle taper | mm | A100 | A100 | A63 |
|
| ස්පින්ඩල් උපරිම වේගය | r/min | 8000 | 8000 | 20000 |
|
| Spindle motor ශ්රේණිගත බලය | kW | 31.4 | 31.4 | 20/25 |
|
| ස්පින්ඩල් ශ්රේණිගත ව්යවර්ථය | Nm | 150 | 150 | 25/31 |
| තුන්-අක්ෂය | X/Y/Z අක්ෂය වේගවත් විස්ථාපනය | m/min | 120/120/120 | 120/120/120 | 120/120/120 |
|
| අක්ෂීය ත්වරණය | m/S² | 10/10/10 | 10/10/10 | 10/10/10 |
|
| ස්ථානගත කිරීමේ නිරවද්යතාවය | mm | 0.015/0.01/0.008 | 0.015/0.01/0.008 | 0.01/0.01/0.008 |
|
| නැවත ස්ථානගත කිරීමේ නිරවද්යතාවය | mm | 0.008/0.008/0.006 | 0.008/0.008/0.006 | 0.008/0.008/0.006 |
| පස් අක්ෂ හිස | B-අක්ෂ ගමන් (අක්ෂ පහේ හිස) | ° | \ | \ | ±110° |
|
| C-අක්ෂ ගමන් (අක්ෂ පහේ හිස) | ° | \ | \ | ±360° |
|
| B-අක්ෂයේ උපරිම වේගය (අක්ෂ පහේ හිස) | rpm | \ | \ | 60 |
|
| C-අක්ෂයේ උපරිම වේගය (අක්ෂ පහේ හිස) | rpm | \ | \ | 60 |
|
| අක්ෂ පහේ හිස ස්ථානගත කිරීමේ නිරවද්යතාවය B/C | arc.sec | \ | \ | 8/8 |
|
| පස්-අක්ෂ හිස පුනරාවර්තන හැකියාව | arc.sec | \ | \ | 4/4 |
| හැරවිය හැකි | තැටි විෂ්කම්භය | mm | \ | \ | \ |
|
| අවසර ලත් පැටවීම | kg | 2000 | 2500 | 2000 |
|
| A-අක්ෂ ගමන් | ° | 360° | \ | 360° |
|
| B-අක්ෂ ගමන් | 0 | \ | 360° | \ |
|
| A-අක්ෂයේ උපරිම වේගය | rpm | 25 | \ | 25 |
|
| B-අක්ෂයේ උපරිම වේගය | rpm | \ | 25 | \ |
|
| ස්ථානගත කිරීමේ නිරවද්යතාවයක් / නැවත නැවත ස්ථානගත කිරීමේ නිරවද්යතාවයක් | arc.sec | 10/6 | \ | 10/6 |
|
| B ස්ථානගත කිරීමේ නිරවද්යතාවය / නැවත නැවත ස්ථානගත කිරීමේ නිරවද්යතාවය | arc.sec | \ | 8/4 | \ |
| මෙවලම් සඟරාව | මෙවලම් සඟරා ධාරිතාව | T | 72 | 72 | 60 |
|
| මෙවලම් හුවමාරු කාලය (TT) | S | 5 | 5 | 5 |
|
| උපරිම මෙවලම් විෂ්කම්භය (සම්පූර්ණ මෙවලම/හිස් මෙවලම) | mm | 110/300 | 110/300 | 80/160 |
|
| උපරිම මෙවලම් දිග | mm | 470 | 470 | 470 |
|
| උපරිම මෙවලම් බර | kg | 20 | 20 | 8 |
තාක්ෂණික පිරිවිතර
| ව්යාපෘතිය | ඒකකය | A20LS+b | A25LS+a | A25LS+b | A25LⅡS+a | |
| සංචාරය කරන්න | X/Y/Z අක්ෂ ගමන් | mm | 2000/1500/850 | 2500*1500*1000 | 2500*1500*1000 | 2500*1500*1000 |
| ස්පින්ඩල් කේන්ද්රයේ සිට A අක්ෂ භ්රමණ මධ්යස්ථානය දක්වා ඇති දුර (Y දිශාව) | mm | \ | ±750 | \ | ±750 | |
| දඟර අග මුහුණේ සිට A අක්ෂ භ්රමණ මධ්යස්ථානයට ඇති දුර (Z දිශාව) | mm | \ | 20-1020 | \ | 20-1020 | |
| B අක්ෂ තැටියේ සිට A අක්ෂ භ්රමණ මධ්යස්ථානයට ඇති දුර | mm | \ | \ | \ | \ | |
| ස්පින්ඩල් මධ්යයේ සිට වැඩ මේසයේ මතුපිටට ඇති දුර (Y දිශාව) | mm | 200-1700 | \ | 200-1700 | \ | |
| දඟර අග මුහුණේ සිට B අක්ෂ භ්රමණ මධ්යස්ථානයට ඇති දුර (Z දිශාව) | mm | 200-1200 කි | \ | 200-1200 කි | \ | |
| B අක්ෂයේ උපරිම භ්රමණ විෂ්කම්භය | mm | 2200 | \ | 2000 | \ | |
| A අක්ෂයේ උපරිම භ්රමණ විෂ්කම්භය | mm | \ | 2000 | \ | 2000 | |
| ස්පින්ඩල් | ස්පින්ඩල් පිරිවිතර (ස්ථාපන විෂ්කම්භය/සම්ප්රේෂණ මාදිලිය) | mm | පස් අක්ෂ හිස | පස් අක්ෂ හිස | පස් අක්ෂ හිස | පස් අක්ෂ හිස |
| Spindle taper | mm | A63 | A63 | A63 | A63 | |
| ස්පින්ඩල් උපරිම වේගය | r/min | 20000 | 20000 | 20000 | 20000 | |
| Spindle motor ශ්රේණිගත බලය | kW | 20/25 | 20/25 | 20/25 | 20/25 | |
| ස්පින්ඩල් ශ්රේණිගත ව්යවර්ථය | Nm | 25/31 | 25/31 | 25/31 | 25/31 | |
| තුන්-අක්ෂය | X/Y/Z අක්ෂය වේගවත් විස්ථාපනය | m/min | 120/120/120 | 120/120/120 | 120/120/120 | 120/120/120 |
| අක්ෂීය ත්වරණය | m/S² | 10/10/10 | 10/10/10 | 10/10/10 | 10/10/10 | |
| ස්ථානගත කිරීමේ නිරවද්යතාවය | mm | 0.01/0.01/0.008 | 0.01/0.01/0.008 | 0.01/0.01/0.008 | 0.01/0.01/0.008 | |
| නැවත ස්ථානගත කිරීමේ නිරවද්යතාවය | mm | 0.008/0.008/0.006 | 0.008/0.008/0.006 | 0.008/0.008/0.006 | 0.008/0.008/0.006 | |
| පස් අක්ෂ හිස | B-අක්ෂ ගමන් (අක්ෂ පහේ හිස) | ±110° | ±110° | ±110° | ±110° | |
| C-අක්ෂ ගමන් (අක්ෂ පහේ හිස) | ±360° | ±360° | ±360° | ±360° | ||
| B-අක්ෂයේ උපරිම වේගය (අක්ෂ පහේ හිස) | 60 | 60 | 60 | 60 | ||
| C-අක්ෂයේ උපරිම වේගය (අක්ෂ පහේ හිස) | 60 | 60 | 60 | 60 | ||
| අක්ෂ පහේ හිස ස්ථානගත කිරීමේ නිරවද්යතාවය B/C | 8/8 | 8/8 | 8/8 | 8/8 | ||
| පස්-අක්ෂ හිස පුනරාවර්තන හැකියාව | 4/4 | 4/4 | 4/4 | 4/4 | ||
| හැරවිය හැකි | තැටි විෂ්කම්භය | mm | \ | \ | \ | \ |
| අවසර ලත් පැටවීම | kg | 2000 | 2000 | 2500 | 2000 | |
| A-අක්ෂ ගමන් | ° | \ | 360° | \ | 360° | |
| B-අක්ෂ ගමන් | 0 | 360° | \ | 360° | \ | |
| A-අක්ෂයේ උපරිම වේගය | rpm | \ | 25 | \ | 25 | |
| B-අක්ෂයේ උපරිම වේගය | rpm | 25 | \ | 25 | \ | |
| ස්ථානගත කිරීමේ නිරවද්යතාවයක්/Repeat ස්ථානගත කිරීමේ නිරවද්යතාවය | arc.sec | \ | 10/6 | \ | 10/6 | |
| B ස්ථානගත කිරීමේ නිරවද්යතාවය/Repeat ස්ථානගත කිරීමේ නිරවද්යතාවය | arc.sec | 8/4 | \ | 8/4 | \ | |
| මෙවලම් සඟරාව | මෙවලම් සඟරා ධාරිතාව | T | 60 | 60 | 60 | 60*2 |
| මෙවලම් හුවමාරු කාලය (TT) | S | 5 | 5 | 5 | 5 | |
| උපරිම මෙවලම් විෂ්කම්භය (සම්පූර්ණ මෙවලම/Eහිස් මෙවලමක්) | mm | 80/160 | 80/160 | 80/160 | 80/160 | |
| උපරිම මෙවලම් දිග | mm | 470 | 470 | 470 | 470 | |
| උපරිම මෙවලම් බර | kg | 8 | 8 | 8 | 8 | |
සැකසුම් උදාහරණය
1.ගුවන් අවකාශය



2. මෝටර් රථ සැකසුම් විසඳුම්